© 2023 yanghn. All rights reserved. Powered by Obsidian
4.1 多层感知机 MLP
要点
- 线性模型是个强假设,激活函数是非线性拟合的核心
- 通用近似原理:激活函数为单个隐藏层的 sigmoid 函数就已经能拟合任意函数了
- 沐神理解:MLP 是一个复杂度很强的模型,但很容易过拟合,造成不好调参,实际用得不多
1. 线性模型可能会出错
softmax 回归 3.4 softmax 回归的本质还是线性回归,softmax 函数只是为了转化为概率计算损失,和均方误差是类似的,线性模型的强假设是:
Quote
因为 softmax 是单调的,任何特征的增大都会导致模型输出的增大(如果对应的权重为正),或者导致模型输出的减小(如果对应的权重为负)
例子:对于图像识别,像素值反转,其实分类的物体应该是不变的,线性模型就失去了预测能力
2. 隐藏层与激活函数
考虑在网络中加入一个隐藏层,仅仅这样是不够的,因为这样本质还是线性函数
加入激活函数
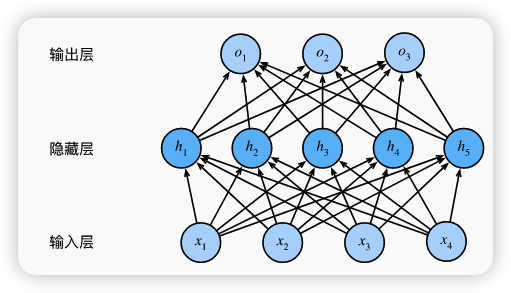
3. 通用近似原理
1989 年,George Cybenko 最早提出并证明了单一隐藏层、任意宽度、并使用 S 函数作为激励函数的前馈神经网络的通用近似定理:一个单隐层网络能学习任何函数,但并不意味着我们应该尝试使用单隐藏层网络来解决所有问题。事实上,通过使用更深(而不是更广)的网络,我们可以更容易地逼近许多函数。[1]
思考:为什么不用单隐藏层来训练所有模型?
- 实际上做不到,而 CNN、RNN 目的就是人为的帮助神经网络提供一些数据本身时间、空间的信息,更有效的训练网络
- 尽管单层神经网络有能力拟合任何函数,但要达到这样的拟合可能需要非常多的神经元,并且可能不是最高效的方法。此外,当函数变得复杂时,单层网络可能很难训练,容易陷入局部最小值,而多层网络(深度网络)可以使用更少的参数更有效地逼近相同的函数,并且通常更容易训练。
4. 各种激活函数
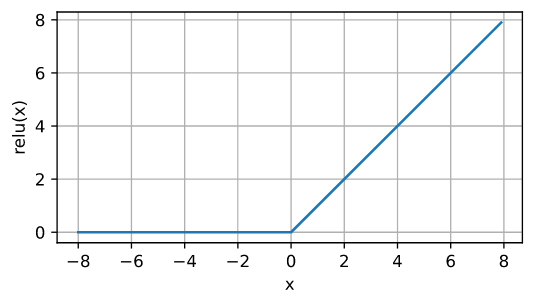
4.1 ReLU 函数
最受欢迎的激活函数是_修正线性单元_(Rectified linear unit,ReLU),因为它实现简单,同时在各种预测任务中表现良好。 ReLU 提供了一种非常简单的非线性变换。
提示
虽然在大于 0 时,ReLU 是线性的,但线性的概念是指输出随着输入线性变化,这种截断破坏了线性性
x = torch.arange(-8.0, 8.0, 0.1, requires_grad=True)
y = torch.relu(x)
d2l.plot(x.detach(), y.detach(), 'x', 'relu(x)', figsize=(5, 2.5))
- 输入为 0 时导数为 0,实际情况输入可能永远都不会是0
4.2 sigmoid 函数
y = torch.sigmoid(x)
d2l.plot(x.detach(), y.detach(), 'x', 'sigmoid(x)', figsize=(5, 2.5))
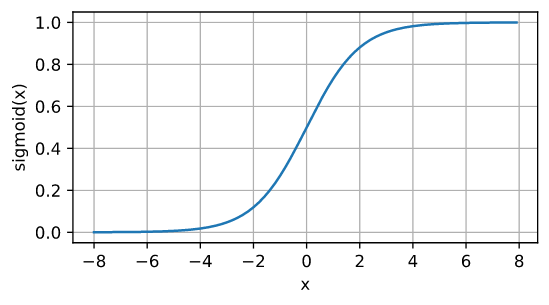
!center Sigmoid 导数图像,最大值 0.25,所以会出现梯度消失
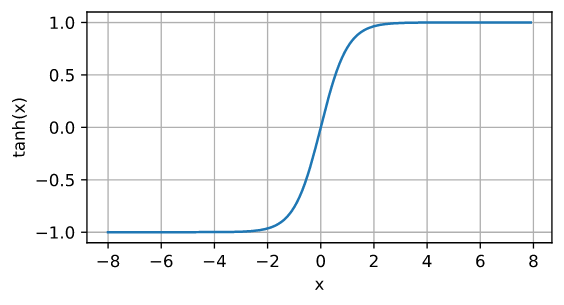
4.3 tanh 函数
y = torch.tanh(x)
d2l.plot(x.detach(), y.detach(), 'x', 'tanh(x)', figsize=(5, 2.5))