© 2023 yanghn. All rights reserved. Powered by Obsidian
6.6 卷积神经网络(LeNet)
要点
- 一般来说,高宽减半,通道数翻倍
LeNet,它是最早发布的卷积神经网络之一,因其在计算机视觉任务中的高效性能而受到广泛关注。 这个模型是由AT&T贝尔实验室的研究员Yann LeCun在1989年提出的(并以其命名),目的是识别图像 (LeCun et al., 1998)中的手写数字
当时,LeNet 取得了与支持向量机(support vector machines)性能相媲美的成果,成为监督学习的主流方法。 LeNet 被广泛用于自动取款机(ATM)机中,帮助识别处理支票的数字。时至今日,一些自动取款机仍在运行 Yann LeCun 和他的同事 Leon Bottou 在上世纪90年代写的代码
1. 网络结构
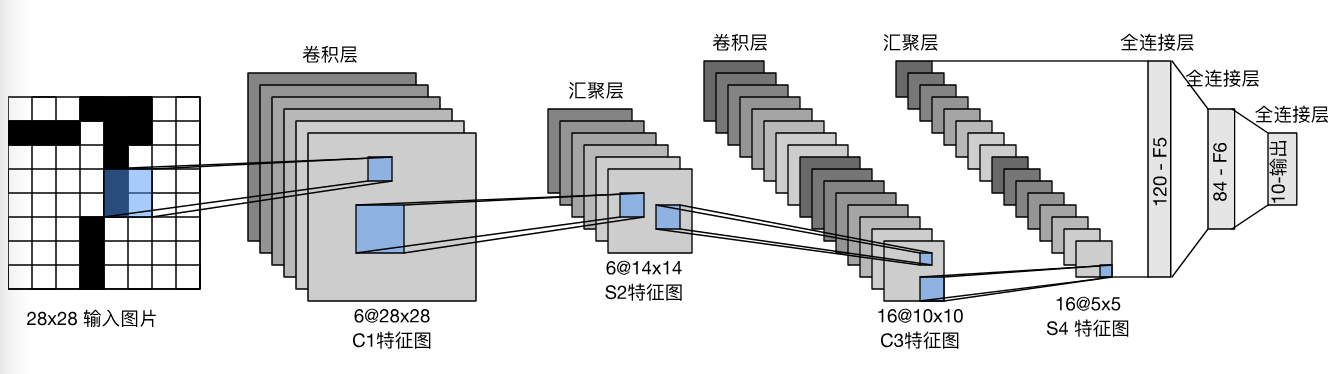
- 2 个卷积层组成:用来学习图片空间结构
- 2 个汇聚层:减少像素敏感度
- 3 个全连接层:转换到类别空间
2. 代码实现
2.1 模型定义
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential( # 1x28x28
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(), # 6x28x28
nn.AvgPool2d(kernel_size=2, stride=2), # 6x14x14
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(), # 16x10x10
nn.AvgPool2d(kernel_size=2, stride=2), # 16x5x5
nn.Flatten(), # 1x16*5*5
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(), # 1x120
nn.Linear(120, 84), nn.Sigmoid(), # 1x84
nn.Linear(84, 10)) # 1x10
提示
Pytorch 有个不好的地方就是要手动算好模型的架构
# 打印一下样本经过各个层的变化大小
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)
Conv2d output shape: torch.Size([1, 6, 28, 28])
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
这里 shape 的第 0 维都是批(batch)的大小,例如 torch.Size([1, 6, 28, 28]) 表示批的大小为 1 个样本,通道数为 6,形状为
2.2 模型训练
基本上与 3.6 softmax 回归的从零开始实现 一致,但在模型评估的时候,我们把数据搬到 GPU 上进行评估:
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
"""使用GPU计算模型在数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() # 设置为评估模式
if not device:
device = next(iter(net.parameters())).device
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
调用这个函数并不影响 data_iter 实际参数存放位置,只是将数据临时搬到 GPU 进行模型评估
下面是训练与评估,注意网络搬到 GPU 与张量搬到 GPU 的不同 5.6 GPU#^0dfcd0
#@save
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型(在第六章定义)"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,样本数
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
loss 0.488, train acc 0.815, test acc 0.804 39314.0 examples/sec on cuda:0
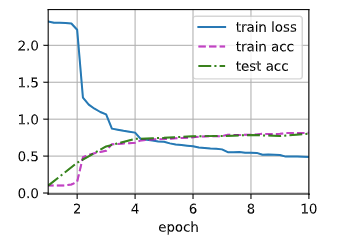
和 MLP 相比 4.3 多层感知机的简洁实现#^ca663a,卷积神经网络模型复杂度不高,所以没有发生过拟合, 还需要进一步微调(CNN 可以达到 0.95,深度学习中这个数字不是最关键的,最关键的是这个值是否达到用户需求),卷积神经网络最大的好处就是高维输入可以很好地学习,这个例子维度不算高,所以能用 MLP 学习
参考文献
- CNN 可视化的图形解释(好看,但没什么用)